



Earth Science Systems LLC (ESS) provides advanced systems for inspection and maintenance of infrastructure–
including concrete structures, asphalt paving, road construction, subsurface utility location and visualization, and HDD navigation. Our systems incorporate the most recent advancements in sensor technology, data science, geophysics, and engineering to make the most capable and easy-to-use equipment on the market!
The most capable and easy-to-use equipment on the market!
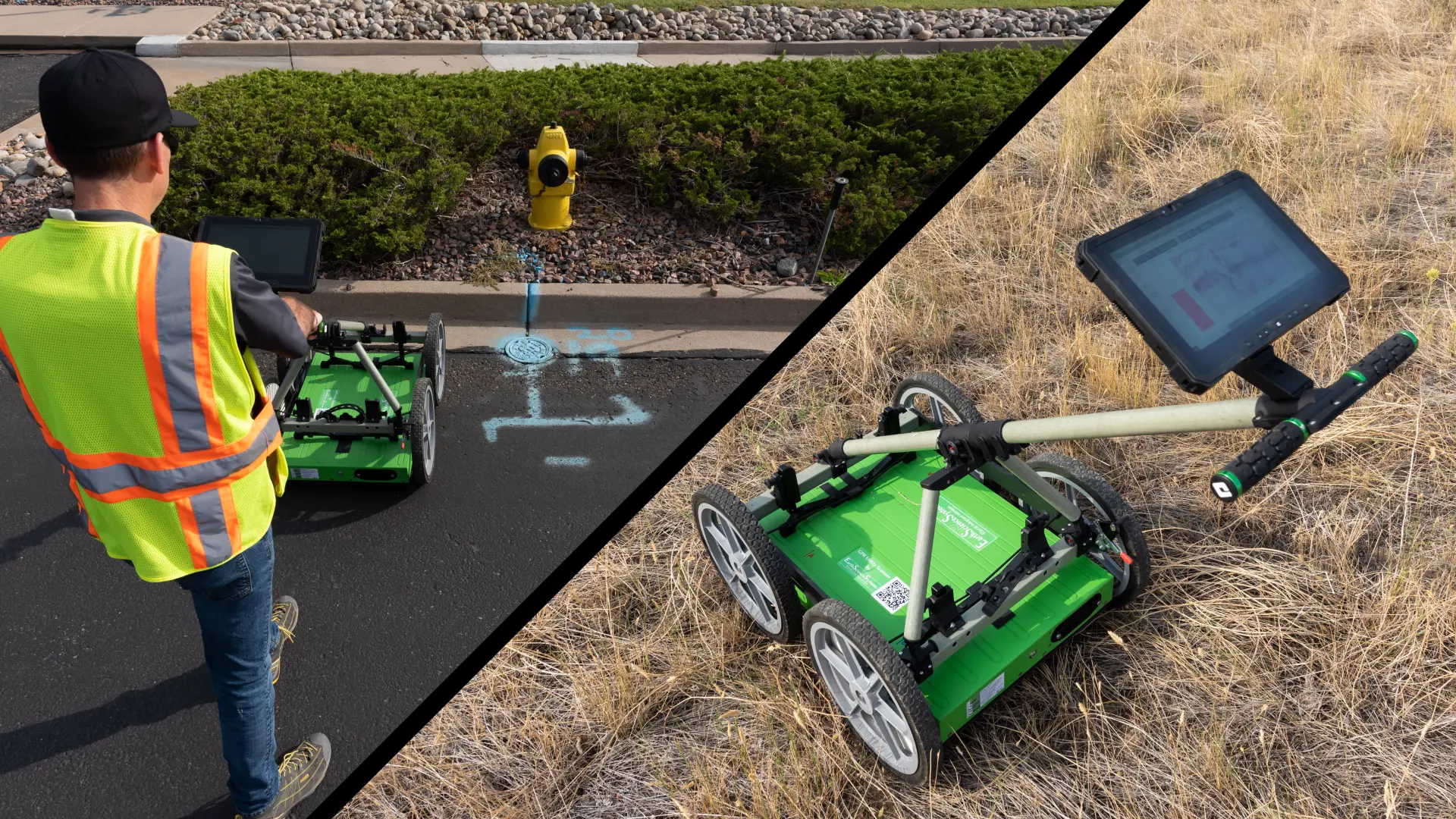
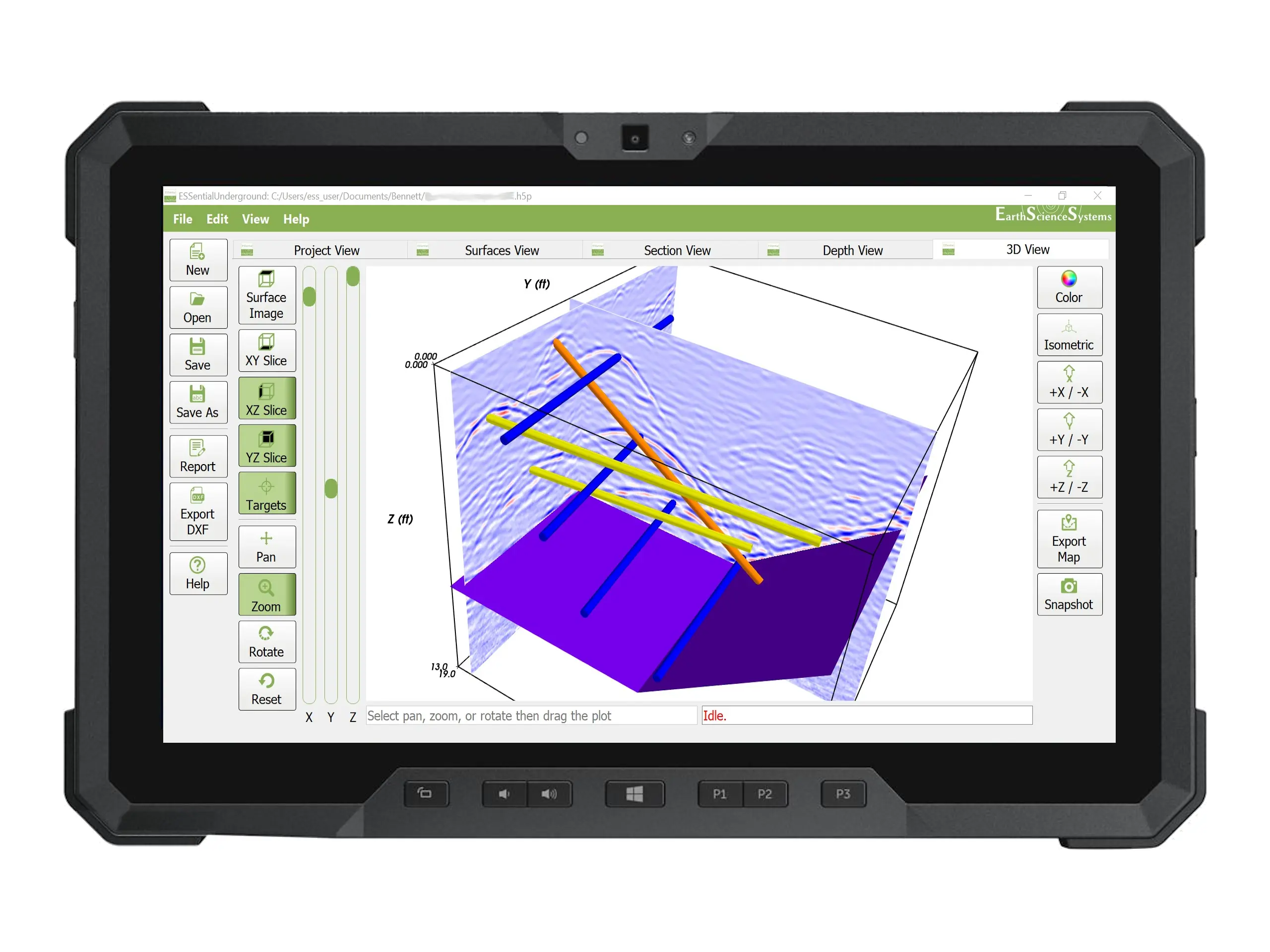
GPR Utility Scanner
A dual frequency, high-resolution GPR system that detects deep utilities
- Locate and map underground utilities
- Subsurface utility engineering
- Integrated GPS
GPR Concrete Scanner
High-resolution concrete scans without sacrificing penetration depth
- Concrete inspection
- Structural analysis
- Wireless – No cables


Cube Seismic System
The most versatile and easy-to-use small scale seismic system available
- Wireless
- Self locating GPS
- Site Characterization – Vs30
Asphalt Pavement Scanner
Unprecedented detail in Q/A and Q/C inspections of new asphalt construction
- Continuous maps of compaction, roughness, thickness, and temperature
- No nuclear sources
